除了AGV,你还需要知道AMR(AGV和AMR的区别)

AGV和AMR的区别,一直是行内外争论不休的问题,二者的关联和界定也处于相对模糊的状态。今天我们给大家带来一篇干货,从背景概念、技术核心到应用效果等方面,全方位地解读AGV和AMR之间的联系和不同。
迄今为止,“AGV和AMR的区别”仍有很多争议。AGV行业的从业者认为AMR就是一种新技术的AGV,而AMR行业的创业者认为AMR和AGV根本是两码事。
本文从概念、导航技术、应用效果和适用场景方面对他们进行对比,希望对大家的理解有所帮助。
概念对比
AGV(Automated Guided Vehicle)即自动导引运输车,“广义”上是指基于各种定位导航技术,不需要人驾驶的自动运输车辆。也就是说,有人驾驶的运输车辆(如人驾驶的叉车)都不是AGV,而没有人驾驶的运输车都是AGV。
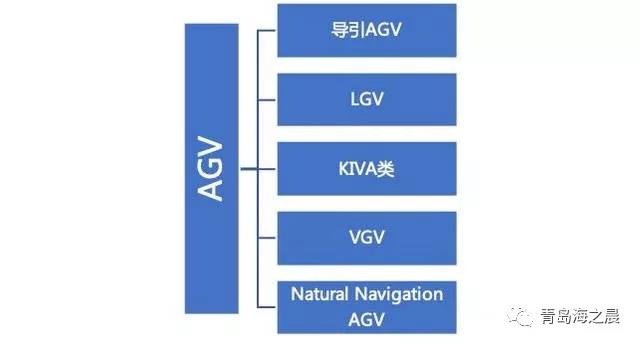
AGV的概念源自工业应用。自1953年第一台AGV问世以来,AGV就被定义为在工业物流领域解决无人搬运运输问题的车辆,但早期AGV的定义仅仅是我们字面上理解的“沿着地上铺设的导引线移动的运输车”,因为20世纪移动机器人技术不发达,AGV行业经历了40多年的发展,市面上的AGV都还是在导引技术里面迭代升级。随着移动机器人技术的发展,为了去掉地面上的实体导引线,出现了激光导航技术,通过高位反光板和定位激光雷达解决AGV精准定位的问题,然后用软件里面的虚拟导引线替代了地面上的实物导引线,这类技术的AGV被称为LGV(Laser Guided Vehicle),目前大部分无人叉车都是LGV。导引AGV多机作业时容易在导引线上阻塞,影响效率,而地标技术的KIVA类移动机器人很好地解决了这个问题。为了更充分地感知环境中的障碍和地图信息,提升AGV的自主性,还出现了通过视觉技术解决定位和导航问题的VGV(Vision Guided Vehicle),以及充分利用激光雷达和地图,比LGV更先进自主的Natural Navigation AGV。所以,现在AGV的定义,是随着移动机器人技术的发展不断扩充而来的。
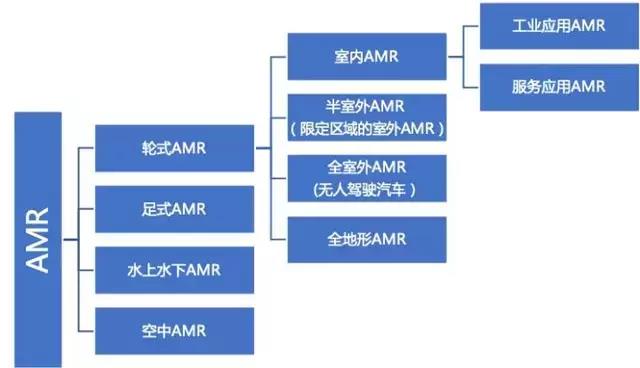
AMR(Autonomous Mobile Robot)即自主移动机器人,“广义”上是指自主性很强的移动机器人。自主性很弱的移动机器人(如遥控机器人,沿着导轨走的移动机器人等)都不能称作AMR,只有自主性很强(能对环境中各种动态变化做出自己的合理反应)的移动机器人(如非遥控的无人机,无人驾驶汽车等)才能被称作AMR。而这里我们所说的“AMR行业”,仅仅“狭义”上指室内AMR和半室外AMR。
AMR的概念源自机器人技术科研领域,承载着科学家们对移动机器人技术发展的期盼——他们希望移动机器人越自主越好。最早被冠以AMR之名的是1948年的ELSIE,它能够主动对环境中的光线产生反应,避让障碍物在环境中移动。移动机器人里面的AMR和非AMR并没有严格的界限,哪怕是现在最先进的AMR技术,也不足以让移动机器人科学家们觉得满意,还有很多提升的空间。随着人工智能和机器人技术的发展,移动机器人的自主性越来越强,AMR的技术标准越来越高。目前最先进的AMR技术,指机器人能够更自主地得到环境的地图,能够尽可能少依赖外部预设传感器做全地图的定位,能够自主而聪明地避开障碍物,能够像人一样聪明地走到目标地点。
可见,AGV和AMR概念的起源不同,背后的推动力量也不一样,但它们确实在工业物流应用领域产生了强交叉。AGV行业的人,一直追求怎么让AGV变得更聪明,更少地对环境改造,更灵活高效的移动特性,而这正是AMR研究者所研究的内容。AMR的研究者们,在AMR技术逐步成熟的时候,想着怎么让AMR变成有商业价值的产品,工业物流场景就是一个非常有价值的应用场景,刚好这个场景又是AGV的主战场。
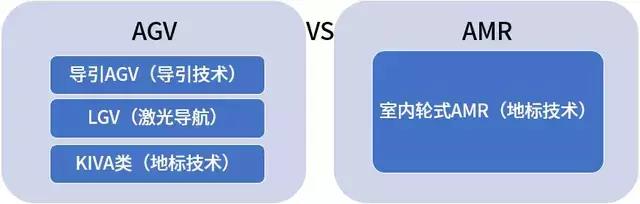
以后我们再详细讨论AGV从业者和AMR创业者之间的概念冲突,这里简单理解:室内轮式AMR和AGV行业所定义的Natural Navigation AGV,及VGV没有太大的区别,但两波人在开发产品时的侧重点有所不同。另外,AMR的应用场景远不止工业物流,应用场景远比目前AGV的应用场景丰富得多。目前我们讨论的“AGV vs AMR”问题,实际上讨论的是“传统移动机器人技术的AGV vs 室内轮式AMR”的问题。
导航技术
导航技术,指解决如何让机器人从当前位置移动到目标地点的技术,通常解决导航问题的前提是解决定位问题。“定位技术”解决的是让机器人知道自己当前在哪里,“导航技术”解决的是让机器人知道如何到达目标地点。
导航技术有很多种,这里只讨论应用最多的几类(这里从比较纯粹的角度对几种常用的导航技术进行概括对比,而实际AGV产品中大多会多种技术混合,以弥补单项技术的不足,满足场景的需求)。
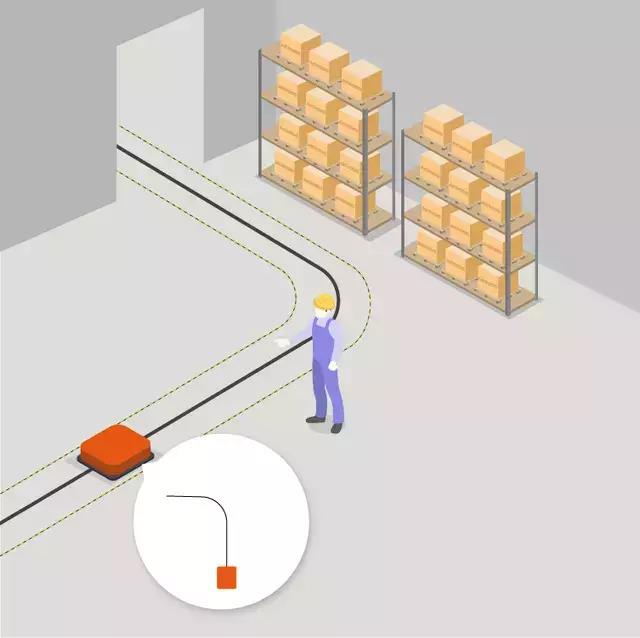
1. 导引技术:地面铺设导引线(电线、色带、磁条等),机器人能够沿固定的导引线移动。
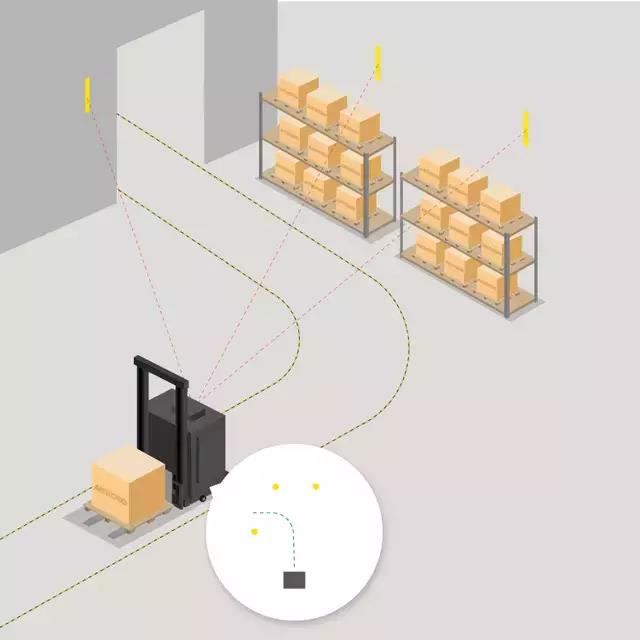
2. 激光导航:一般在高位(2m左右)的墙面设置反光板,通过机器人上面的定位激光雷达测量带坐标信息的反光板,对机器人进行高精度定位,然后在软件层面生成虚拟导引线,机器人能够沿着虚拟导引线移动。
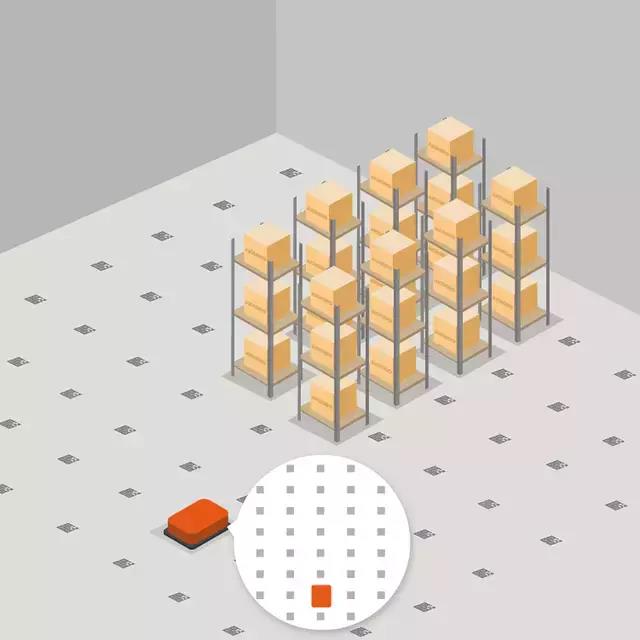
3. 地标技术:地面铺设地标(如二维码),机器人能够在地标之间移动。
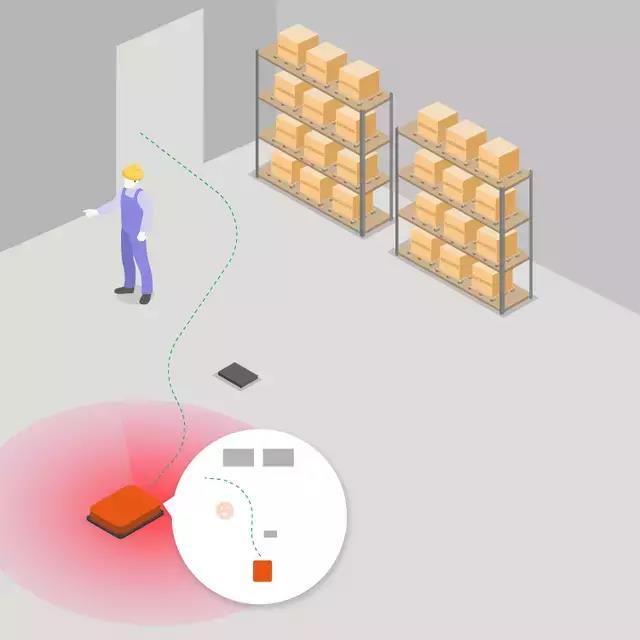
4. 自主导航:自主导航的前提是有一副环境地图,机器人可以在地图上进行全地图定位,当有指令告诉机器人目标点的地图坐标时,机器人自主规划路径,并沿着自主规划的路径到达目标地点,同时能够充分感知环境中的动态障碍,进行主动避让。
科尔摩根是一家非常优秀的自动化解决方案和核心部件供应商,很多AGV企业基于他们提供的解决方案完成了自己的AGV产品。视频里总结了市面上常用的一些AGV导航技术,都可以归类于我们前面提到的4类。
科尔摩根
我们从下面几个技术维度对4类导航技术进行对比:

1. 地图,指机器人系统对环境的直接认知和预设,而我们看到的“地图”往往是站在人的角度扩充信息后对环境的描述。传统AGV导航技术的地图都受限于部署标记物,无法对环境充分认知。而AMR的地图是真实环境的复现,并且加上地图更新技术后能够保持与环境变化的一致。
2. 定位,指让机器人知道自己当前在哪。导引AGV的定位最弱,导引线上无法定位,只能借助其他点定位技术补充;地标技术其次,机器人必须在地标点上面才能定位;激光导航的定位范围较广,凡是定位激光雷达能够观测到3个反光板的地方都可以给自己定位。而AMR的定位是全地图范围内任意点定位。
3. 感知,指机器人通过传感器,对环境信息的采集和分析处理。传统AGV都被定义在特定区域运行,这些区域往往会用黄线标识出来,应避免在这些区域里堆放异物,人或其他车辆通过这些区域的时候有义务避开AGV,但为了安全,AGV往往会配备一些传感器做简单的障碍感知。而AMR从诞生就是为了应用在自然的环境中,机器人主动感知环境然后做出合理反应,因此AMR上配置的传感器最为丰富,需要感知到各种可能出现的异物,才能做出正确反应。
4. 避障,指机器人移动过程中感知到障碍后,为保障正常通行做出的反应。最安全的避障策略是停等,即等障碍物消失之后再正常通过;最高效的避障策略是带预判的主动避让,即观察环境中的运动障碍,预判轨迹然后计算最合理的避障轨迹绕行。传统AGV因为受限于地图范围、定位、感知等技术,往往只能采用停等策略,运行效率低,而AMR则以主动避让为主,根据场景特点调整避障策略。
5. 路径规划,指机器人规划从当前位置到达目标位置的路径。导引AGV是固定的路径,受地上导引线的束缚,通过不同导引线的组合很容易规划到达目标地点的路径。LGV则是软件层面的导引线,可以随时改动,但也只能在自己的安全通道内规划路径。KIVA类机器人的路径规划则比较复杂,通过不同地标点的组合,能够同时协调多台机器人同时作业,不易发生阻塞。而AMR的路径规划是基于地图的动态路径,更加灵活,多机协同效率高,结合避障还能实现高效的人机协同。
应用效果
我们从下面几个角度对几种类型的AGV和AMR进行对比。
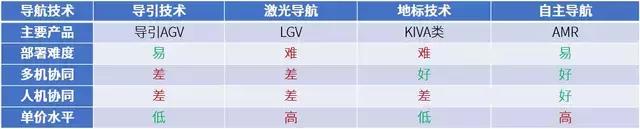
1. 部署难度。导引AGV的部署比较简单,现在大多是贴磁条导引线,粘贴方便而且不易损坏,导引AGV软件上的设置也比较简单。LGV的部署作业麻烦的点主要体现在反光板的坐标标定上,然后是基于标定的地图规划虚拟导引线路,其他的部分和导引AGV差不多。相比之下KIVA类的部署更麻烦,粘贴二维码后需要对二维码进行标定,如果是旧拣选区还涉及改造。而AMR的部署最为简单,基于SLAM技术操作机器人绕着AMR运行区域走两圈绘制出环境地图即可,然后在直观的地图上进行储位编辑。
2. 多机协同。导引AGV的活动范围受实体导引线的约束,多机在实体导引线上只能排队,或者像火车轨道线那样进行交通管制,协同效果最差。LGV由于是虚拟导引线,交通线路可以很复杂,多机协同效果要优于实体导引线的AGV。KIVA类由于基于离散的地标进行定位导航,不易发生拥塞,多机协同效率高。AMR则更为自由灵活,任何没有障碍的区域都可以通行,同样多机协同效率高。
3. 人机协同。AMR由于拥有深度感知、动态路径规划和主动避障的能力,和传统导航技术的AGV相比,还拥有人机协同的特性。而传统技术的AGV在感知、路径和避障上都较弱,在动态复杂的人机协同环境下容易出现安全风险。这是AMR和传统技术AGV区别最大的地方。
4. 单价水平。同等水平下的不同AGV和AMR的成本差异,主要在于配备的传感器,核心部件的差异。其中导引AGV和KIVA类都不需要复杂传感器,核心部件容易采购,成本低。而LGV和AMR受传感器和核心部件的限制,成本较高。
适用场景
我们以点到点运输场景为例,从下面几个角度对几种类型的AGV和AMR进行对比。
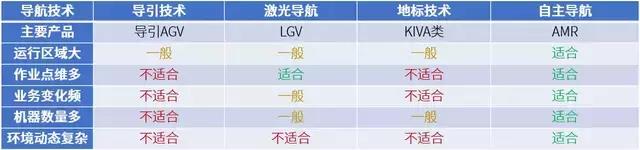
1. 运行区域。运行区域越大,那么部署的时候需要铺设的导引线、反光板、地标越多,也就意味着部署越麻烦,部署成本越高。而AMR不管多大的区域,只是在软件层面绘制出地图,部署成本并不会增加(这里不考虑额外的增强定位基站)。
2. 作业点位。如果场景内需要机器人作业停靠的点位越多,那么对于导引AGV和KIVA类而言,需要铺设的地标交通路线越复杂。而LGV是软件层面的导引线,反光板定位覆盖区域都可以精准定位,AMR是动态规划的路线,地图上任意点都能定位,这两种适合多点位停靠的场景。
3. 业务变化。对于导引AGV和KIVA类机器人而言,大部分业务变化意味着重新部署,改造麻烦。如果业务变化不涉及作业区域变化,LGV只需要在软件层面修改导引线。无论是作业区域还是作业点位的变化,AMR只需要在软件地图上进行编辑,或者重新构建地图。
4. 机器数量。当机器数量多的时候,就涉及到机器之间协同作业的问题,导引AGV容易在导引线路上发生拥塞。LGV可以在软件上增加多条导引线路缓解拥塞问题,而KIVA类可以铺设较宽裕的地标,让机器在宽松的地标区域解决交通拥塞的问题。AMR在地图范围内任意可行区域进行动态路径规划,只要通道宽度足够则实时交通管制,拥塞问题最容易解决,多机运行效率高。
5. 环境动态复杂。同前面提到的人机协同优势,人和机器在同一个场景里面活动作业,AMR因为有感知避障的优势,适合复杂动态的环境内作业,这是AMR区别于传统AGV最大的特点。
既然AMR各方面都具有优势,是不是就能够替代传统AGV呢?答案是否定的,AMR与传统AGV的关系并非升级换代的关系,而是场景互补的关系。

如上图,工业物流的场景主要是工厂和仓库的场景,当我们解决一个工业物流场景的自动化问题时,遵循一个原则:“在解决问题的基础上尽可能控制成本”。
1. 如果这个场景是业务固定,简单且业务量少的点到点运输场景,那么导引AGV有价格优势,选择导引AGV既能解决问题,又节约成本。
2. 如果这个场景环境动态复杂,那么只有AMR能够解决好场景问题。
3. 如果这个场景作业点位多,或者业务变化频繁,那么AMR更适合,传统技术的AGV很难在保障经济回报的同时解决好场景问题。
4. 如果这个场景的作业面积很大,或者业务量大机器投入量多,虽然很多技术方案都可以使用,但AMR在大部分情况下更有优势。因为面积大的作业区域,AMR部署成本更低,对于大量机器的应用,AMR运行效率更高,需要投入的机器数量更少。虽然AMR单价较高,但整体方案投入少,回报期短,而且风险更低。
5. 除去上面讨论的点到点运输场景,还有订单拣选的场景,如果订单拣选是密集存储或者密集分拣的场景,KIVA类机器人是最适合的,既能发挥它的多机协同优势,又具有价格优势。而在点到点运输场景,相对于导引AGV而言,它的部署和维护更麻烦,不具优势。
6. 从成本和场景特性的角度看,导引AGV、KIVA类和AMR的选择区分度很明显,但同样单机成本较高的LGV和AMR,似乎AMR的自主导航技术就完胜LGV的激光导航技术。在AGV行业发展过程中确实有这种趋势,从LGV到Natural Navigation AGV(相当于AMR),行业内有种说法,叫做从“有反光板激光导航AGV”到“无反光板激光导航AGV”。但目前,LGV的激光导航技术在叉车上的应用成熟度比AMR的自主移动技术在叉车上的应用成熟度高很多,叉车形态的移动机器人自主移动安全性很难保障,所以更多的还是在人机相对隔离的环境中应用,或者采用保守的避障策略在相对安全的大通道内运行,这样就失去了AMR的人机协同和效率优势。所以当前从技术应用成熟度角度看,无人叉车的场景,LGV仍有很大的市场。
工业物流的场景,即工厂和仓库的物流场景,大部分物流作业还是人驾驶叉车,或者人手推车来完成物流作业。而不同类型的AGV和AMR都有他们适用的场景,只是AMR适用的场景会比传统AGV适用的场景多得多,这些市场有待我们去开发。
文章来源:知乎,原作者佘元博,原标题:《AGV vs AMR》
【免责声明】文章为整理文章,仅供读者交流使用,不做商业用途。本文观点不代表本公众号观点,如因作品内容和版权存在问题,请于本文发布三小时内联系AI制造进行删除沟通。
相关文章
FlashFxp百度网盘下载链接:https://pan.baidu.com/s/1MBQ5gkZY1TCFY8A7fnZCfQ。FlashFxp是功能强大的FTP工具
Adobe Fireworks CS6 Ansifa绿色精简版网盘下载
firework可以制作精美或是可以闪瞎眼的gif,这在广告领域是需要常用的,还有firework制作下logo,一些原创的图片还是很便捷的,而且fireworks用法简单,配合dw在做网站这一块往往会发挥出很强大的效果。百度网盘下载链接:https://pan.baidu.com/s/1fzIZszfy8VX6VzQBM_bdZQ
Navicat for Mysql是用于Mysql数据库管理的一款图形化管理软件,非常的便捷和好用,可以方便的增删改查数据库、数据表、字段、支持mysql命令,视图等等。百度网盘下载链接:https://pan.baidu.com/s/1T_tlgxzdQLtDr9TzptoWQw 提取码:y2yq
火车头采集器是站长常用的工具,相比于八爪鱼,简洁好用,易于配置。火车头能够轻松的抓取网页内容,并通过自带的工具对内容进行处理。站长圈想要做网站,火车头采集器是必不可少的。百度网盘链接:https://pan.baidu.com/s/1u8wUqS901HgOmucMBBOvEA
Photoshop(CS-2015-2023)绿色中文版软件下载
安装文件清单(共46G)包含Window和Mac OS各个版本的安装包,从cs到cc,从绿色版到破解版,从安装文件激活工具,应有尽有,一次性打包。 Photoshop CC绿色精简版 Photoshop CS6 Mac版 Photoshop CC 2015 32位 Photoshop CC 2015 64位 Photoshop CC 2015 MAC版 Photoshop CC 2017 64位 Adobe Photoshop CC 2018 Adobe_Photoshop_CC_2018 Photoshop CC 2018 Win32 Photoshop CC 2018 Win64
windows10原装正版ISO镜像下载,可装VM(附官方升级工具)
1、原版镜像直接安装 (1)双击iso文件,进入DVD驱动器。 (2)点击setup。 (3)点击“是”。 (4)勾选上进入安装下一步。(由于笔者机器已经安win10,所以变成了安装更新,win7的电脑可能会进入真正的安装界面)
microsoft office办公软件网盘下载(附破解激活教程)
1、双击office镜像文件,会进入虚拟DVD驱动器。 2、点击“office”文件夹,点击“setup64”运行64位安装程序。 3、弹出提示框,选择“是”。 4、进入安装过程。 5、安装完成。
1、将安装文件夹解压出来。双击文件夹。 2、点击“绿化”。 3、弹出窗口,选着“是”。 4、弹出黑窗口,接下来基本上几秒钟,就完成安装。 5、桌面上会出现IDM下载器图标。
Microsoft project项目管理软件版网盘下载(附激活教程)
1、将Project安装镜像解压到文件夹,解压后状态如下。2、双击。会进入到DVD驱动器。3、默认是“否”,这里要选择“是”。4、勾选“接受条款”,选择“继续”。百度网盘下载链接:https://pan.baidu.com/s/1KSYMvS7UKY4JreldctKxBw
流程图软件Microsoft visio版激活教程及网盘下载
1、双击下载文件,会进入DVD驱动器,双击setup文件。2、提示更改,选择"是"。3、进入安装界面。这个界面一般及比较久,也是看电脑配置,配置好的话一般安装会比较快。
一、首先打开飞刀象棋助手官网。官网链接:www.fdxqzs.com。二、点击下载最新安装包,可以在官网直接进行下载,也可以通过下方链接下载。
目前市面上的强软并不多,主要有小虫象棋、飞刀象棋、天机象棋、象棋旋风,下面分别一一进行介绍。1、小虫象棋,2019年以前目前多次获得象棋比赛的冠军,有较多的强软比较喜欢套小虫象棋的壳。小虫象棋的历史棋力还是非常不错的,最新一版更新到2022年07月,后面也没看到新的版本出来。
一、常用绘图快捷键。最基本的一些画图的功能操作,简单来说就是CAD制图的打底部分。(如下图)二、常用编辑快捷键CAD中对图形进行修改的操作。
OpenAI官网显示,为ChatGPT项目做出贡献的人员不足百人(共87人)。从成员毕业高校分布看,校友最多的前5大高校是斯坦福大学(14人)、加州大学伯克利分校(10人)、麻省理工学院(7人)、剑桥大学(5人)、哈佛大学(4人)和佐治亚理工学院(4人)。
第一步 上网工具。打开上网工具,工具基本是需要付费使用的。注册然后按照教程安装,直到能够测试上网打开即可。
FlashFXP绿色版网盘下载,附激活教程 3398
FlashFxp百度网盘下载链接:https://pan.baidu.com/s/1MBQ5gkZY1TCFY8A7fnZCfQ。FlashFxp是功能强大的FTP工具
Adobe Fireworks CS6 Ansifa绿色精简版网盘下载 3325
firework可以制作精美或是可以闪瞎眼的gif,这在广告领域是需要常用的,还有firework制作下logo,一些原创的图片还是很便捷的,而且fireworks用法简单,配合dw在做网站这一块往往会发挥出很强大的效果。百度网盘下载链接:https://pan.baidu.com/s/1fzIZszfy8VX6VzQBM_bdZQ
navicat for mysql中文绿色版网盘下载 2932
Navicat for Mysql是用于Mysql数据库管理的一款图形化管理软件,非常的便捷和好用,可以方便的增删改查数据库、数据表、字段、支持mysql命令,视图等等。百度网盘下载链接:https://pan.baidu.com/s/1T_tlgxzdQLtDr9TzptoWQw 提取码:y2yq
火车头采集器(旗舰版)绿色版网盘下载 3168
火车头采集器是站长常用的工具,相比于八爪鱼,简洁好用,易于配置。火车头能够轻松的抓取网页内容,并通过自带的工具对内容进行处理。站长圈想要做网站,火车头采集器是必不可少的。百度网盘链接:https://pan.baidu.com/s/1u8wUqS901HgOmucMBBOvEA
Photoshop(CS-2015-2023)绿色中文版软件下载 3136
安装文件清单(共46G)包含Window和Mac OS各个版本的安装包,从cs到cc,从绿色版到破解版,从安装文件激活工具,应有尽有,一次性打包。 Photoshop CC绿色精简版 Photoshop CS6 Mac版 Photoshop CC 2015 32位 Photoshop CC 2015 64位 Photoshop CC 2015 MAC版 Photoshop CC 2017 64位 Adobe Photoshop CC 2018 Adobe_Photoshop_CC_2018 Photoshop CC 2018 Win32 Photoshop CC 2018 Win64